User Tools
Table of Contents
Lightning McQueen

“LiPo turned Baltimore's car - a good vehicle that was designed to run just behind the speed leaders - into an adrenaline-charged beast that could now out-pull and out-run nearly every car since the beginning of the fused era.”
Built By: Baltimore Burners
First Race Date: Maker Faire NYC, 2015
Current Status: Active
Motor: Proteus x524 brushless, 1050KV, $104
ESC: Turnigy Trackstar 200A, $80
Battery 1: 28.8V 20Ah LiPo, 8x 4S 5Ah, $88 (176)
Battery 2: 28.8V 32Ah LiPo, 4x 4S 16Ah, $100 (200)
Battery 3 (not used): 24V 20Ah LiFe, 2x 4S 20Ah, $104 (208)
Gearbox: 10:54 chain reduction + DWP849 8.2:1 right-angle gearbox, $35
ECU: Custom Firmware running on Teensy 3.2, built through Arduino IDE
If you're the kind of person who likes to read dry operating manuals, here's one for you. Builder Jeremy Ashinghurst drafted this manual for the Sparkfun and Pittsburgh 2016 races that he was unable to attend. Lightning McQueen's Operating Manual
This Power Racing Series build is based, in large part, on Charles Guan's Chibi Mikuvan build, which he very generously documented in extensive detail.
History
Initial Build
Baltimore had found VERY powerful motors for about $30 apiece. Series-wound brushed DC motors are common fodder for engine starter motors, and certain diesel generators had 24V 5kW starter motors that were very powerful but whose solenoid contacts were quite fragile. McQueen was originally built with a 24V starter motor and 16:1 gearing, supplied with Optima D51's. An Alltrax SPM served as a temporary controller until a cheaper unit could be sourced, and much fun was had in the super torquey but surely inefficient motors. The frame was heavy, the batteries were heavy, and the controller was expensive. So in order to be more competitive, it was rebuilt.
Brushless Rebuild (New York 2015)
Very nearly turning McQueen into a perfect example of a “Ship of Theseus”, Baltimore did a complete rebuild from the ground up (only components unchanged: the plastic body and the axles) in advance of the NYC race for September 2015. They stole borrowed overall system design from Charles Guan's excellent Mikuvan blog posts. Knowing, however, that the fuse would allow far more than 2HP, they opted for a motor that could deliver the increased power over a wider portion of its operating curve.
At its debut race weekend and less than 24 hours after its firmware was completed, It qualified third and placed sixth overall for the weekend. The high qualifying position was no doubt due to the ECU (at the time an 8MHz arduino) which would allow the fuse to be over its rated current for set amounts of time and modeled how the fuse cooled over time.
Accidentally Awesome (Detroit 2016)
Qualifying third in its debut race weekend was quite inspiring, and Baltimore knew they had a winning formula on their hands. When the 2016 rules came out and allowed the use of LiPo batteries, the Baltimore team bought 8x 5Ah 14.4V LiPo battery packs to replace one of their LiFe packs which had been driven negative during some testing. Since an 8S LiFe can use a 60A fuse but an 8s LiPo can only use 50A, the ECU switched its current limits out based on the voltage of the battery pack at controller boot.
Despite the reduced current limit, LiPo turned Baltimore's car - a good vehicle that was designed to run just behind the speed leaders - into an adrenaline-charged beast that could now out-pull and out-run nearly every car since the beginning of the fused era.
The switch to LiPo was a clear, immediate, unexpected, and unbeatable performance gain for this vehicle. Though the current limit went down 17%, the voltage increased by nearly 13% so net power out of the battery could remain fairly unchanged. Additionally, battery impedance went down on the LiPo pack so the voltage did not sag under load. This meant that net power to the motor actually increased substantially under heavy acceleration. The creation of McQueen's first LiPo pack was paired with a change in system wiring from 10AWG to 6AWG, which also contributed to the decreased system impedance and increased power. Finally, the higher voltage of LiPo coupled with its lower impedance meant that the car could now hit 23mph on a fully charged LiPo pack, much higher than the 19mph that it was capable of on LiFes. Remember what your KV rating means, folks!
Firmware Iterations
Handling Overhaul (New York 2016)
Nervous with anticipation for NYC's expected showdown between speed demon McQueen and the dream-handling dialed in beauty of Master Builders Racing's MB44, Baltimore decided some handling changes were in order. Prior to NYC16, McQueen's driving characteristics could best be summed up by legendary author Douglas Adams:
“Looks like a fish, moves like a fish, steers like a cow.”
True to its real(Pixar)-world inspiration, McQueen handled great on long tracks or where every turn was the same direction as the last. Once you threw a right-hander after a left, though, things got dicey. Knowing that NYC tracks are usually tight, Baltimore prioritized some choice tweaks to the frame that could hopefully help sort things out. They had deduced that the primary cause of horrific handling was the fact that most of the weight was located directly over the live rear axle, resulting in terminal understeer. The changes were fairly straightforward, but had a profound effect.
- Move Rear axle back
- Move Front axle back
- Add more caster to front axle
- Add foot rests above front bumper
The handling difference was like that of night and day, and suddenly the car became safer, more capable, more predictable, and overall much more drivable. There's still some understeer and the higher speeds mean it's still an incredible workout to drive well for long periods of time, but the handling changes were likely responsible for shaving nearly a second off Baltimore's lap time in NYC.
Innovations
“Nothing is new under the sun” is a saying that is as true in PRS as it is in real life. It is doubtful that anything on Lightning McQueen was a true PPPRS 'first', but some of its characteristics are worth explaining because they were not common at the time.
Quick-Change Battery Pack
 McQueen has always had a quick-change battery pack, even before its brushless rebuild. When it was still powered by Optima D51's and driven by a starter motor, a 24V 35Ah Lead Acid battery pack slid into the right hand side of the car behind the front wheels and latched into place.
McQueen has always had a quick-change battery pack, even before its brushless rebuild. When it was still powered by Optima D51's and driven by a starter motor, a 24V 35Ah Lead Acid battery pack slid into the right hand side of the car behind the front wheels and latched into place.
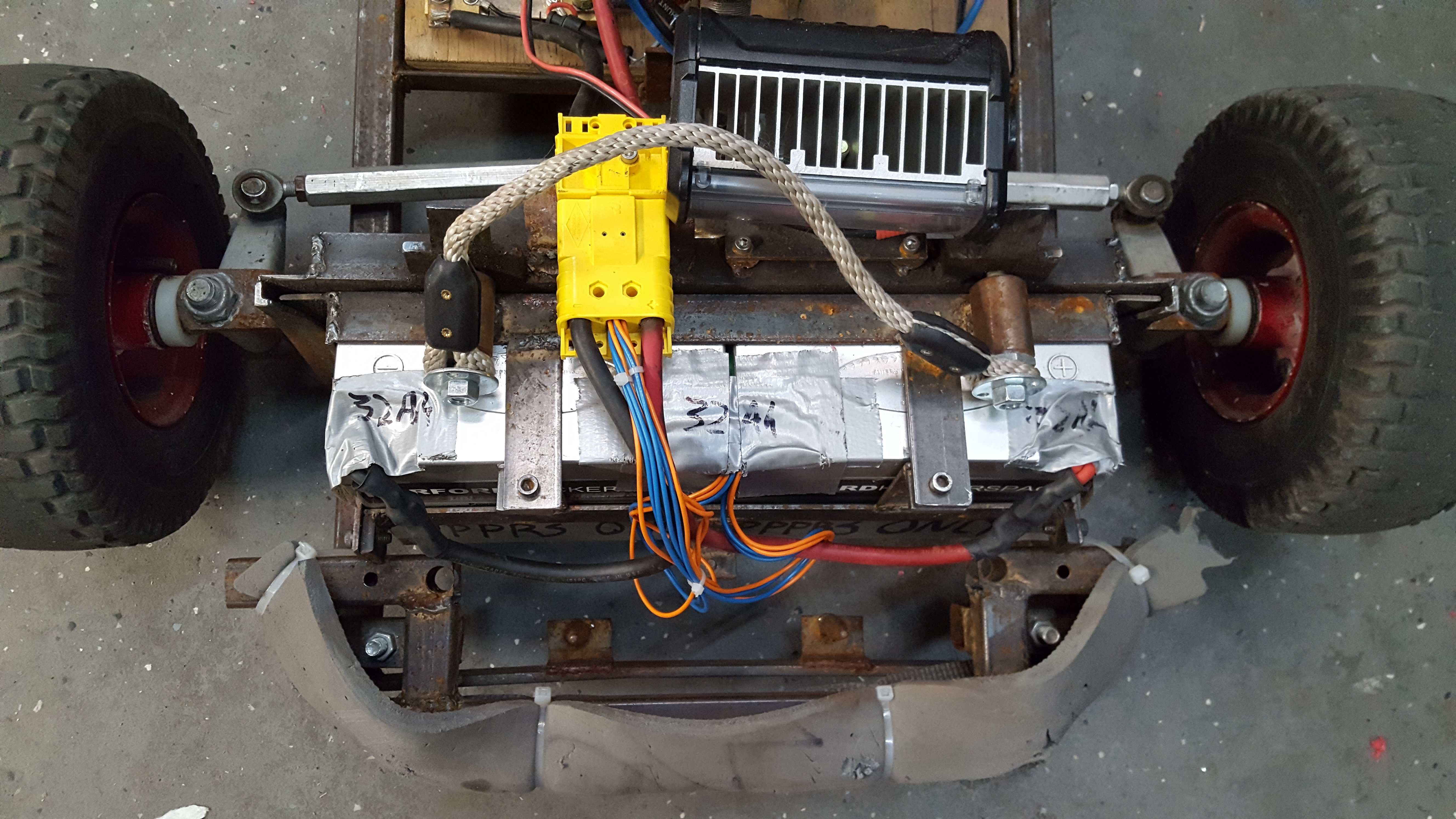
When McQueen was rebuilt into the sensorless-brushless-driven, lithium-powered vehicle it is today, Baltimore kept with the idea of a quick-change battery pack but moved the location of the pack to under the front hood. this would make extraction during a race easier (since it would be vertically extracted) as well as slightly improving the weight distribution since the battery pack is now forward of the front axle instead of behind it. The battery is lifted out of the car by pulling on a rope strap, and a new battery is dropped into placed, allowed to latch, and plugged in. During an endurance race, a well-executed battery change will not increase driver change pitstop times more than a couple seconds.
Detachable Trailer
After observing the utility and fun of TrainRex's boxcar and caboose, Baltimore decided to expand their trailer lineup by building a themed 1-seater trailer for Lightning McQueen. The seat is a standard folding chair, painted red with yellow racing stripes. Towing around cargo or a person does significantly impact McQueen's acceleration but due to the current-limiting ECU, full-throttle performance is still possible and overall top speed is unaffected (provided a passenger can hold on).

Launch Control
Lightning McQueen has a launch control feature programmed into its ECU that gives the driver the ability to maximize the speed and consistency of off-the-line speed while minimizing the risk to the fuse. Like most of the performance advantages of McQueen, launch control's effectiveness was merely a happy side effect of its original purpose, to aid heavier newbie drivers who consistently blew fuses on zero-speed starts.
McQueen is run by a sensorless brushless motor, so accelerating from a dead stop presents a twofold issue in the form of cogging (trying to synchronize the motor with the controller). While the motor is cogging, the vehicle is not moving, delaying the driver from moving forward. Additionally, while the motor is cogging, motor current may be nearly short-circuit levels, and therefore a couple seconds of cogging at full throttle can result in blown fuses or smoked ESCs. Other sensorless brushless setups (CMV) rely on hump-starting to ease the motor into synchronization: the driver inputs some momentum to get the system started.
McQueen takes hump starting a few steps further with the addition of a brake switch and a speed sensor. With the brakes applied, the ECU cuts all throttle to the ESC, so this allows the driver to merely release the brake lever in the middle of a hump start, with the throttle pulled all the way, to get a true full-throttle start. With the addition of the speed sensor, McQueen is able to limit the throttle to the ESC to only 20% until it detects significant motion. This indicates to the ECU that the ESC is synchronized with the motor and full-throttle conditions will not damage the ESC and are less likely to blow the fuse. After the ECU detects speed (1mph), it will allow throttle outputs of greater than 20%. Even with a synchronized ESC, however, currents at very low speeds are very difficult to control effectively, so the fuse overcurrent limit is set artificially low until a secondary speed threshold is reached. After the secondary speed threshold is reached (3mph), the ECU allows full fuse overcurrent limits to be set based on the fuse resistance or fuse modeling.
Fuse Modeling
McQueen's initial brushless firmware included fuse modeling, a basic algorithm to attempt to predict how much overcurrent the fuse would be able to tolerate based on the fuse datasheet. This was certainly not a PRS first, as several other vehicles have deliberately monitored and allowed overcurrent conditions to exist. Since this fuse modeling algorithm represents a good deal of what makes McQueen so fast,information on it is deliberately vague in an attempt to encourage others to figure out their own unique solutions. It was running on the vehicle during NY 2015 and Detroit 2016, and the implementation is similar to a custom reservoir controller.
Fuse Measurement
 During the early summer of 2016, Baltimore Hackerspace and FUBAR Labs began to exchange information about a new type of current limiting algorithm that would improve even on the performance of Baltimore's fuse modeling. Both teams had custom controller firmware with ready access to data outputs and were doing current monitoring and active current limiting, and decided to take it one step further by monitoring how close the fuse was to blowing. Details here are also vague, but it involves continuously watching the fuse to keep it below a critical temperature. This type of current limiting is capable of small , <10% performance gains versus the modeling Baltimore had been using before and requires a tremendously higher amount of vigilance since the limiting runs the fuse much closer to its actual breaking point. Reliability has been spotty with this type of current limiting and seems to require a far lengthier amount of time to tune in well.
During the early summer of 2016, Baltimore Hackerspace and FUBAR Labs began to exchange information about a new type of current limiting algorithm that would improve even on the performance of Baltimore's fuse modeling. Both teams had custom controller firmware with ready access to data outputs and were doing current monitoring and active current limiting, and decided to take it one step further by monitoring how close the fuse was to blowing. Details here are also vague, but it involves continuously watching the fuse to keep it below a critical temperature. This type of current limiting is capable of small , <10% performance gains versus the modeling Baltimore had been using before and requires a tremendously higher amount of vigilance since the limiting runs the fuse much closer to its actual breaking point. Reliability has been spotty with this type of current limiting and seems to require a far lengthier amount of time to tune in well.
Datalogging and display

Things to add:
lessons learned
driving style
sample data chart
app screenshot
section on firmware evolution
section on datalogging
more pictures and media
